Adaptive Filtering
An Extended Kalman Filter (EKF) estimates the navigation solution by combining several different sources of information, including integrated acceleration and angular rates, navigation models, and external measurements
The most basic kind of adaptive filtering is simple outlier rejection, where measurements are discarded when they are deemed extremely unlikely according to the current state estimate and the measurement error model. The 3DM-GQ7 goes further and uses additional feedback to modify the measurement and dynamic system error models, ensuring that they remain consistent with the actual measurements.
Adaptive Filter Examples
Two examples are provided here which illustrate the adaptive filtering concept as implemented on the 3DM-GQ7. These simple examples are for a sensor operating in vertical gyro mode (tracking pitch and roll angles), but the concepts extend to all operating modes and supported aiding measurements.
Vibration Induced Error Rejection
Sensor performance can be sensitive to the tuning of the measurement models used by the Kalman filter, and a fixed filter tuning is only optimal for a specific level of sensor noise or background vibration level. Since it is not practical or convenient for a user to manually tune the filter for different applications, operating regimes, or dynamic conditions, the 3DM-GQ7 uses adaptive Kalman filtering. Adaptive filtering continuously updates the measurement models in real time to maintain consistency between modeled and actual measurements. In this example, a 3DM-GQ7 in vertical gyro mode is subjected to an intermittent period of increased vibration with a large lateral acceleration component (shown in the lower graph). The top graph compares the roll angle error with two different fixed tunings against the roll angle error experienced with adaptive filtering turned on.
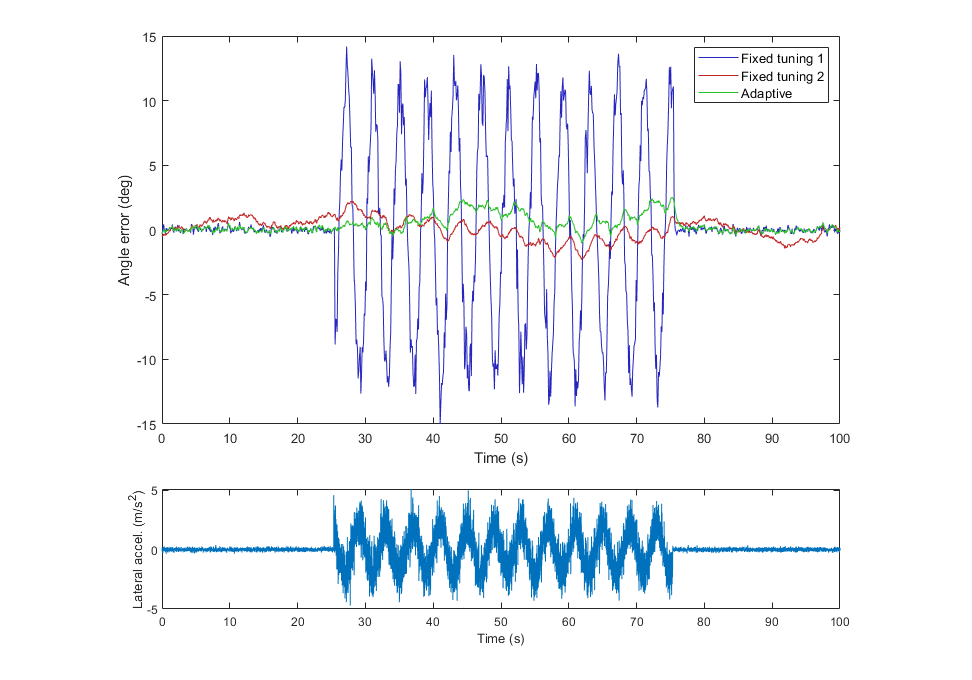
The first filter ( Fixed tuning 1) has a fixed tuning which weights angle estimates from the accelerometers more. The second filter (Fixed tuning 2) has a fixed tuning that weights the accelerometers less. The third filter uses the 3DM-GQ7 adaptive filter.
In this example, Fixed tuning 1 performs very well when there is very little vibration, but it does not give good results when the vibration level is high. Likewise, Fixed tuning 2 does well when the vibration level is high, but does not do as well when there is very little vibration. The adaptive tuning transitions smoothly between these two regimes, giving good performance over a wide range of operating scenarios.
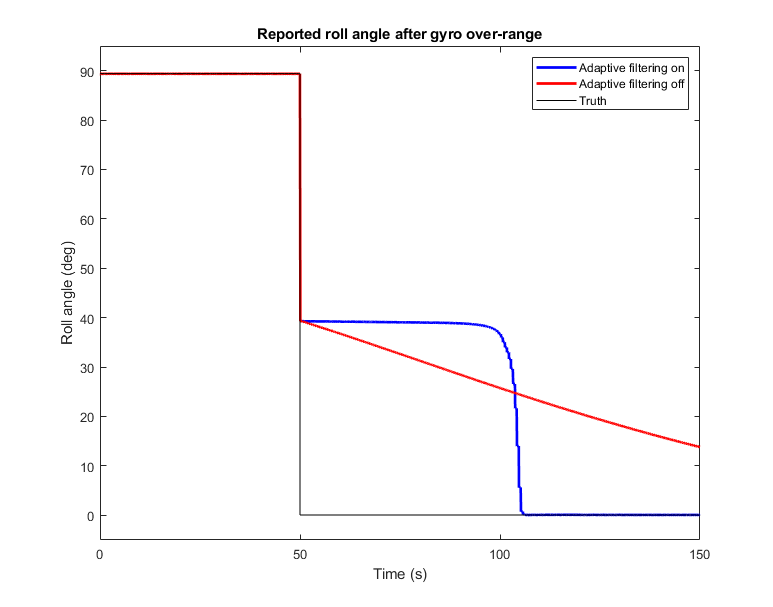
Over-range Recovery
The adaptive Kalman filter hastens recovery from an unexpected dynamic error. In this example, a true rotation of
Without adaptive filtering, the time constant for recovery is constant. When adaptive filtering is turned on, the time constant starts high, then gets increasingly smaller until the filter has recovered.
Adaptive Filter Options
On the 3DM-GQ7, users can control two parameters which influence the adaptive filtering. The first parameter is the adaptive filtering level, which controls how aggressively the filter will adjust its statistical models in response to inconsistent measurements. The second is the adaptive filtering time constant, which controls how quickly the filter will adapt. See for Adaptive Options (0x0D,0x53) more information on changing these parameters.